Vehicle Dynamics and Control Simulation Playground
Introduction
Vehicle dynamics and control is a fascinating field that blends physics, engineering, and technology to understand how vehicles move and respond to forces. While it can seem complex at first, breaking it down into manageable concepts is key to advancing modern transportation, especially in the development of electric and autonomous vehicles. To make this learning process more accessible, I’ve built a MATLAB/Simulink model that simulates both longitudinal and lateral vehicle dynamics. This tool is designed to help students, researchers, and engineers experiment with control strategies in a flexible and modular environment.
What is the Vehicle Dynamics Simulation Model?
This simulation model is a practical tool for exploring and analyzing vehicle behavior under different conditions. It’s particularly useful for those interested in sustainable transportation, as it incorporates electric motors as primary actuators. Whether you’re a student learning the basics or a researcher testing advanced control strategies, this model provides a hands-on way to engage with vehicle dynamics.
Key Features of the Model
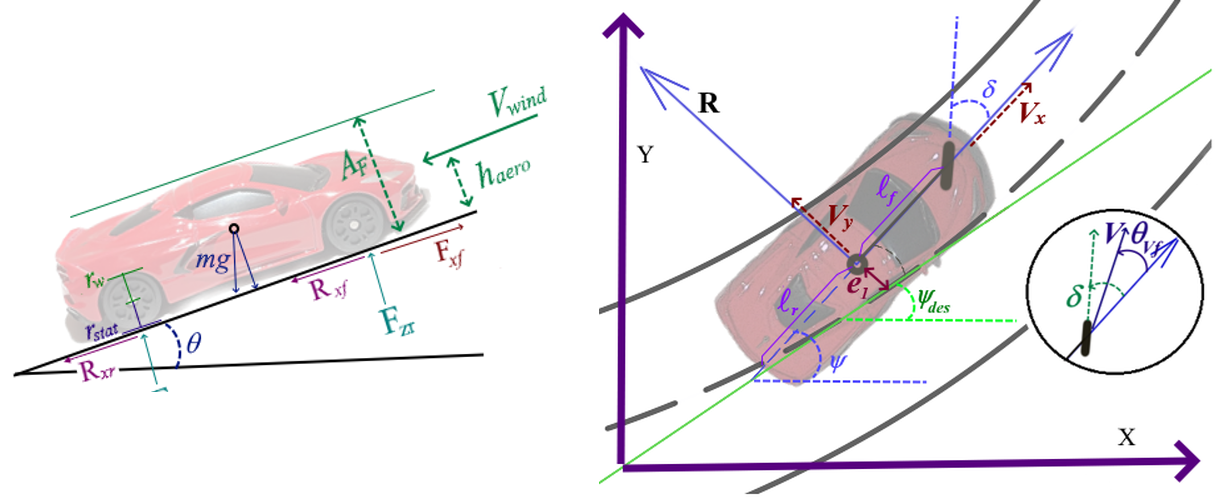
- Longitudinal Dynamics: Simulates acceleration, braking, and traction forces.
- Lateral Dynamics: Focuses on steering response, cornering, and stability.
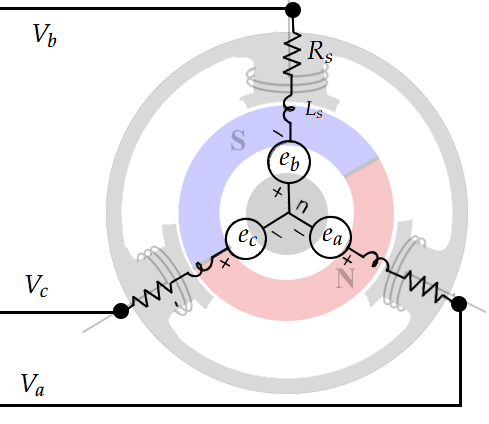
- Electric Motor Integration: Models vehicle actuation using BLDC and DC motors.
- Waypoint-Based Navigation: Implements a method commonly used in autonomous vehicle path planning.
Why This Model Matters
The automotive industry is evolving rapidly, with a strong focus on electric and autonomous vehicles. To develop energy-efficient powertrains, advanced driver-assistance systems (ADAS), and reliable self-driving algorithms, a solid understanding of vehicle dynamics is essential. This Simulink model offers a safe and practical way to test control strategies in a simulated environment before applying them to real-world systems.
How to Get Started
- Download the Model: The simulation files are available on GitHub for anyone to access.
- Run Simulations: Open MATLAB, load the Simulink model, and experiment with different driving conditions.
- Modify Parameters: Adjust initial conditions, control strategies, and vehicle properties to explore various scenarios.
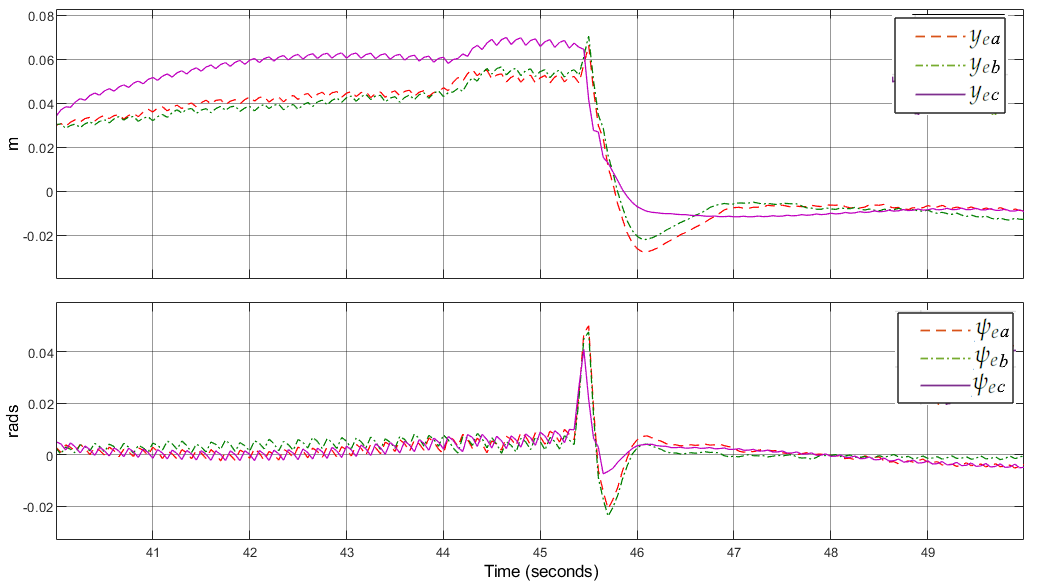
- Analyze Results: Use the built-in visualization tools to study trajectory tracking, speed control, and stability.
Join the Community
This project is open-source and collaborative, and I’d love for others to contribute, improve, and expand the model. Whether you’re developing new control strategies, learning about vehicle dynamics, or simply curious about how vehicles work, this tool is a great starting point.
The future of mobility is electric and autonomous—let’s explore it together!
For more details and to access the model, visit our GitHub repository: GitHub Link or click here to open it: 